Escadrille parée !


Section Aéromodelisme Léo Lagrange

Peu de vent ce matin, mais quelques nouveautés sympas ont été sorties des voitures! Un aéroglisseur convertible en hydroglisseur, à voir en indoor ? Un joli Spitfire qui a malheureusement fini dans le champ sur un décrochage et départ en vrille…Et le RareBear le plus puissant du monde : 1200 Watts dans le ventre, et fumigène incorporé 😀





Après un vol déchainé, ils ont finalement réussi une belle collision! Par respect pour le modélisme, on ne citera pas leur nom…

Bonjour à tous
Dans cet article je vous présente quelques exemples simples de programmation pour une radio sous OpenTX. (Valable pour Turnigy 9X flashé, Taranis X9d , Horus, etc…)
Les débuts sur OpenTX sont un peu déroutants. En effet, il n’existe quasiment rien de prédéfini, vous êtes complètement libre d’attribuer chaque voie où bon vous semble, à la différence des Futaba, Graupner, Spektrum et autres… Cependant lorsque vous créez un nouveau modèle , la radio vous posera quelques questions sur ce que vous voulez faire. (aile delta, planeur, hélico, etc).
Il faut comprendre que programmer un modèle consiste à associer des entrées (les manches, les potards) avec des sorties (les voies du récepteur). MAIS la difficulté c’est que plusieurs entrées peuvent simultanément pointer vers plusieurs sorties, et réciproquement, et tout cela se combine ensemble!
Plutôt que d’utiliser la radio pour définir tous les réglages, je vous recommande de passer plutôt par le logiciel OpenTX Companion 2.1 . En effet , il présente les mêmes menus que la radio, mais vous bénéficiez de la souris de votre ordinateur pour l’ergonomie. De plus vous pourrez tester visuellement un mixage avant de l’envoyer dans la radio, grâce au simulateur de radio incorporé dans OpenTx Companion.
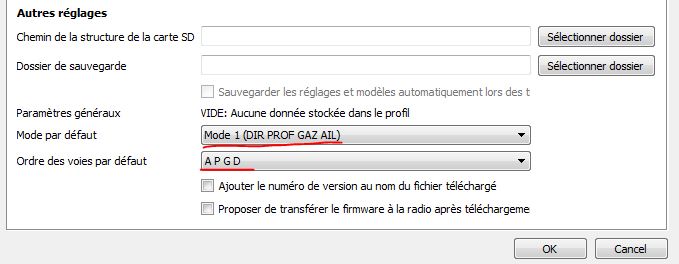
Lancer OpenTX companion et allez dans réglages/préférences réglez le mode réel de votre radio (Mode1 dans la majorité des cas) et l’ordre des voies par défaut. L’ordre indiqué est assez standard (APGD = voie3 = gaz) , mais ce n’est pas une obligation. Et il peut être changé au moment du mixage.
Faire fichier/nouveau et double cliquer sur la ligne 1, et faite annuler. Vous venez de créer un modèle par défaut.
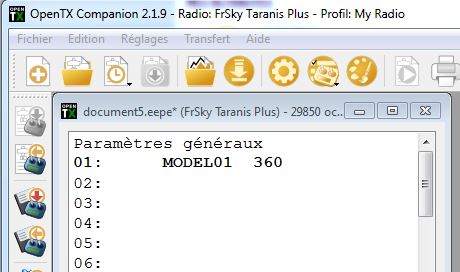
Companion permet de programmer entièrement le modèle et de l’envoyer ensuite dans votre radio, nous allons utiliser cette méthode. Double-cliquez sur MODEL01. Vous découvrez une fenêtre qui est identique en terme de réglages aux différents écrans dans la radio. Passez sur l’onglet mixage et Effacer tous les mixages.
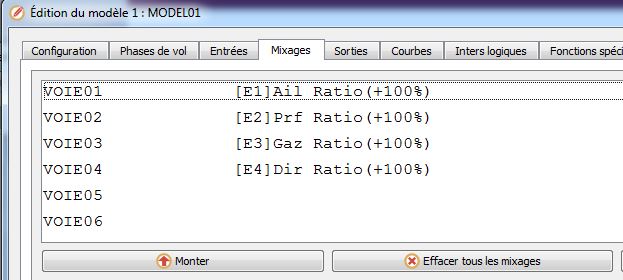
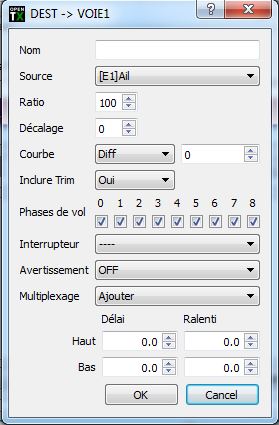
On va tenter de créer un mixage aile delta : il est intéressant de démarrer par ce type d’avion qui ne possède que deux élevons (en général), et nécessite un mixage simple. Dans l’onglet configuration, changer le nom du modèle par DELTA1. On commence par créer le contrôle des ailerons. Sur Voie01 faites clic-droit ajouter, vérifiez que la source est [E1] Ail et faites OK.
Répétez l’opération sur la Voie02 pour obtenir cela:
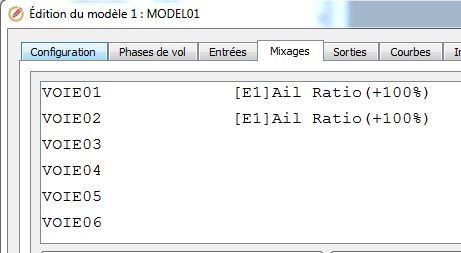
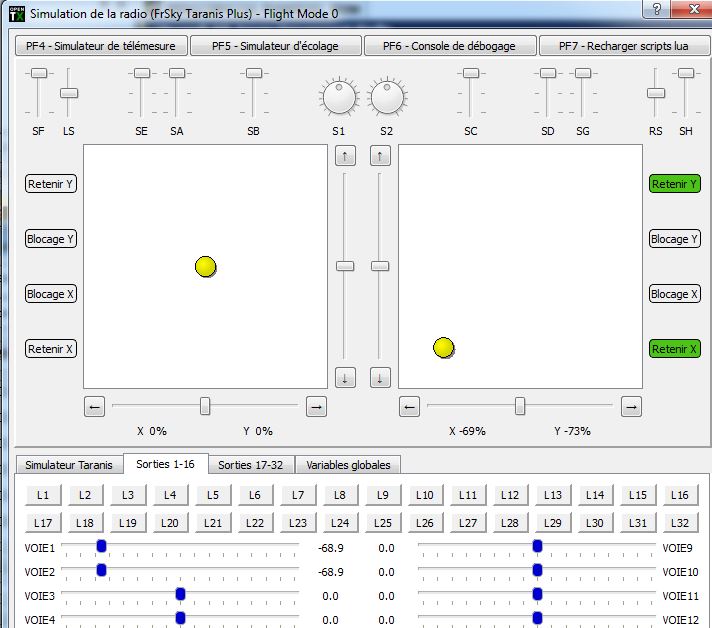
Cliquez sur Simulation et faites bouger le manche aileron. Vous allez constater que les 2 voies bougent dans le même sens, ce qui est normal. En effet sur une aile , les servos qui sont installés en miroir selon le plan de symétrie vertical, bougent en réalité dans le même sens. Dans votre modèle les ailerons iraient donc bien en opposition, c’est ce qu’on veut pour les ailerons.
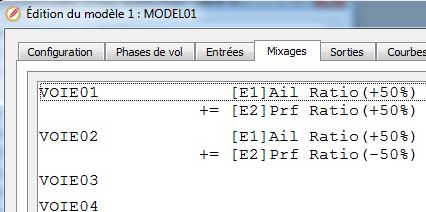
On va ajouter maintenant le mouvement lié à la profondeur. On rajoute un mixage sur la Voie01, source [E2]prof. multiplexage=ajout.
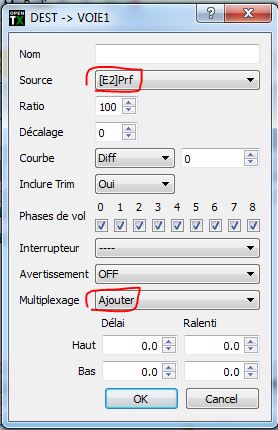
La radio va combiner la position des deux manches ail-prof en les ajoutant, pour sortir sur la Voie01. Sur la Voie02 on ajoute le même mixage mais en prenant -100%. Vous obtenez cela:
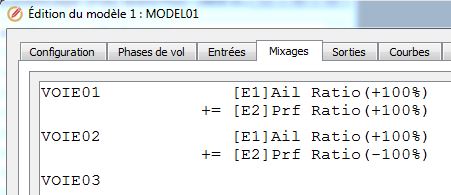
Lancez Simulation et constatez que les mouvements des Voies01-02 sont a l’unisson sur le manche aileron, et à l’opposée sur le manche profondeur. C’est ce qu’on voulait. Il y a un phénomène qui nuit à la précision des manches: les mixages s’ajoutent, c’est à dire qu’avec 100% sur chaque manche, si on envoie simultanément aileron et profondeur à fond , on va avoir 200% sur le servo relié à cette voie. Mais cependant les servos n’explosent pas, pourquoi? Car un écrètage à 100% est fait, en réalité on ne peut jamais dépasser 100% en sortie évidemment. Ce qui fait qu’au final on perd la moitié de la course des manches. C’est dommage et préjudiciable à la précision.
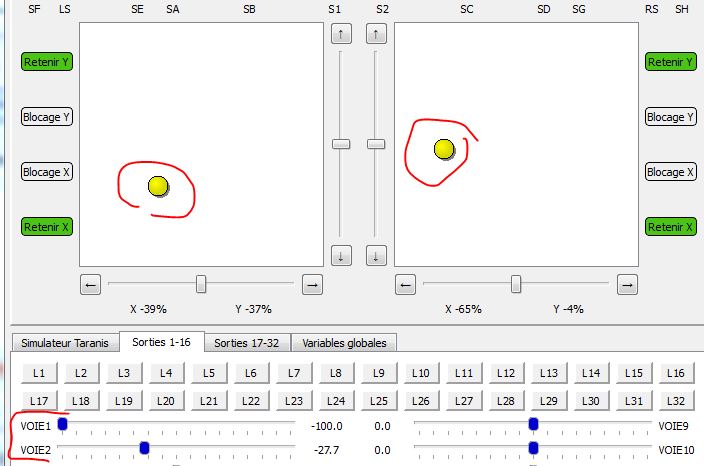
Pour contrer ce phénomène, on va diminuer la contribution (ratio) de chaque manche au mixage à 50% comme ceci.
En simulation , vous constaterez que la course maximum d’une voie est alors atteinte uniquement par la contribution des 2 manches à fond. C’est mieux pour la précision de pilotage.
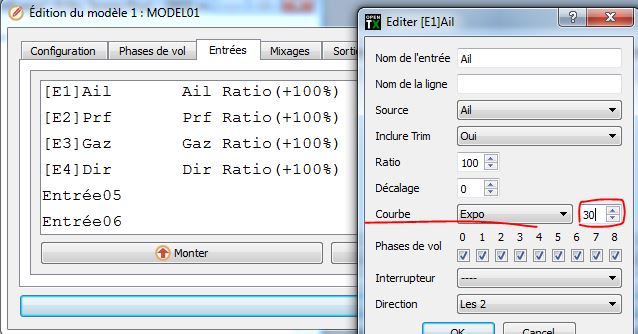
Passons a l’exponentiel qui est un lissage de la réponse du manche autour du point neutre, elle permet de faciliter les petites corrections , en gardant intacte la course maxi du manche. 30% d’expo est une valeur courante. Ca se trouve sur l’onglet Entrées ici. Vous pouvez mettre plus de 30% aux ailerons, en général un delta est plus sensible en roulis.
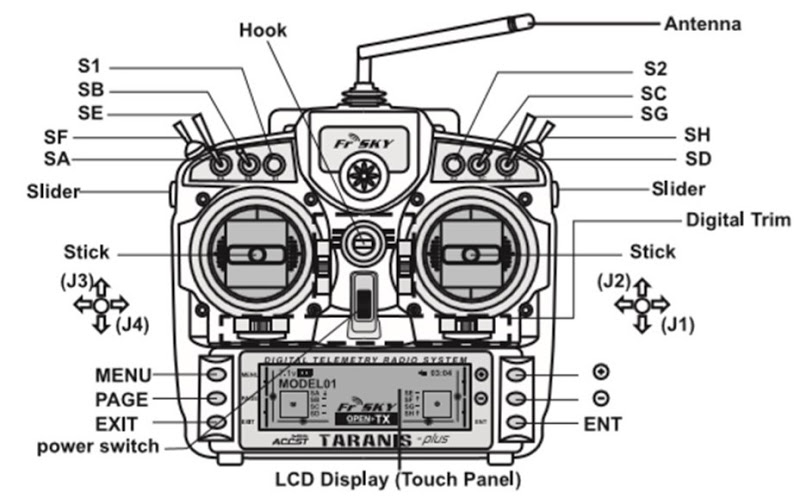
Voila! Vous avez créé à partir de rien un mixage aile delta sur OpenTX. Nous allons l’améliorer. Imaginons qu’il y a un moteur, et que l’on veut un inter de sécurité qui bloque le moteur. Je me sers pour cela de l’inter 2 positions SF (sur une taranis ci-dessous).
Quand on allume la radio , une alarme indique que les inters doivent être en position off, on va associer à cette position une valeur de gaz nulle imposée pour plus de sécurité. Tout d’abord on va rajouter un mixage [E3] gaz vers la Voie03 (commande de gaz). Puis passons dans l’onglet fonctions spéciales. Le rôle de cet écran est de règler le déclenchement d’actions sur des interrupteurs. (utile pour un train rentrant par exemple). On impose ici une valeurs de -100 sur la voie des gaz en cas d’interrupteur SF en position sécurité. Oui -100 !! et non pas 0 , qui serait mi-gaz, attention!

Lancez la simulation et vous voyez que la voie des gaz ne monte QUE si l’inter SF est en bas , ET le manche de gaz >0.
Vous voulez connaître le temps de vol? On va associer le démarrage d’un chrono au même interrupteur. C’est dans le premier panneau Configuration. La différence c’est que le chrono démarre dans la position inverse de la mise en sécurité du moteur (flêche vers le bas + SF)
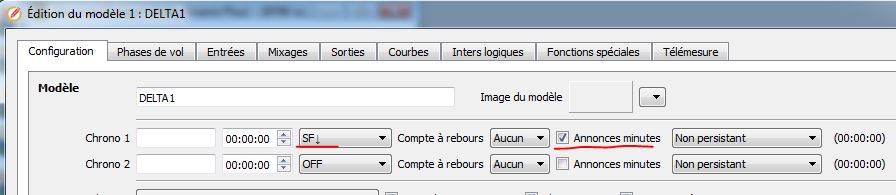
Ainsi avec un seul interrupteur, on désactive la sécurité du moteur ET on lance un chrono. Voila un aperçu de la flexibilité d’OpenTX ! Maintenant il est temps de sauvegarder.(Fichier/Enregistrer)
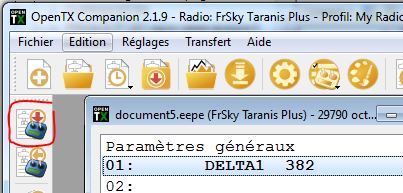
Branchez votre radio éteinte au port USB de l’ordinateur, et cliquez sur lire les réglages et modèles depuis la radio, un nouveau document va s’ouvrir contenant les modèles déjà présents dans votre radio.
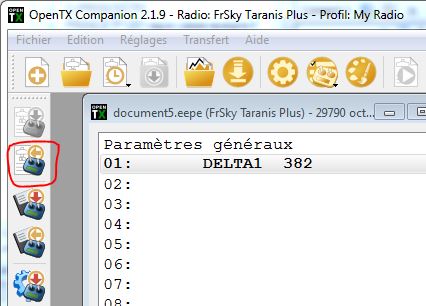
Glissez le modèle DELTA1 à un emplacement libre de la nouvelle fenêtre documentX.eepe et cliquez sur Transférez les règlages.
Votre nouveau modèle est maintenant dans la radio. Il est temps de tester les mixages sur l’avion réel. Selon les modèles de servos , ils ne vont pas toujours dans la même direction en fonction du signal, aussi il faudra peut être corriger le sens de déplacement. Pour cela, vous pouvez utiliser l’écran sortie (OUTPUTS) sur la radio (ici Taranis). Inverser la flêche avec le bouton ENT pour inverser le sens de la voie.
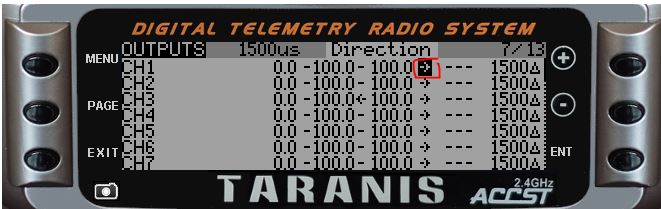
Deuxième problème, la course des servos peut être telle qu’ils rentrent en collision avec le modèle, ou bien une charnière force, ou ça grogne, etc…Il peut être nécessaire de limiter leur déplacement. Dans ce même écran , vous allez jouer sur les valeurs MIN et MAX. Ce sont des limites absolues au dela desquelles la radio ne pourra jamais aller quelque soit la position des manches ou les mixages. Toutefois si vous devez limiter à 50% le déplacement d’un servo, c’est que sans doute il faut changer de trou sur le palonnier, ou le guignol. Privilégiez tout d’abord un bon réglage mécanique, la radio est la pour affiner. En effet, les servos devraient toujours travailler sur la plus grande plage de leur course possible.
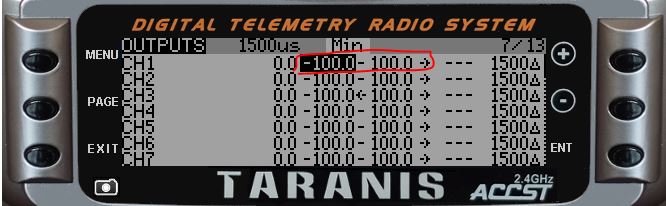
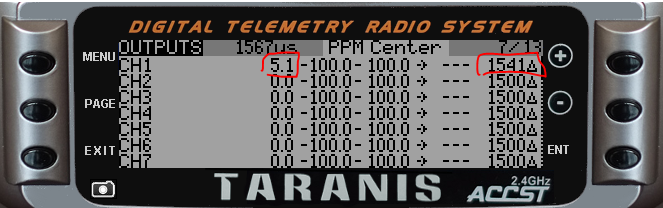
Troisième chose, vous pouvez régler précisément le neutre de chaque servo avec ce menu également. (on appelle parfois ça les subtrims). Deux possibilités: soit vous modifiez le zéro de gauche, soit vous jouez sur le timing du signal PPM par défaut à 1500ms. (je ne rentre pas dans les détails). Modifiez un seul de ces 2 paramètres à la fois.
Attention à bien utiliser la version de Companion qui correspond au firmware de votre radio! La dernière version 2.1 présentée ici, est prévue pour les dernières versions de FW. Si la lecture des modèles ne se fait pas, prenez une version 1.x ici
Voila, dans le prochain article, je vous proposerai des mixages plus avancés: compensation gaz-profondeur, dérive-profondeur, des volets-ailerons, des trappes de train rentrants séquencées…
Bons vols à tous.